راه اندازی مثلث - دفاع کامل در مقابل حرکت The Triangle Setup - A complete defense against 1.d4
اختصاصی از یارا فایل راه اندازی مثلث - دفاع کامل در مقابل حرکت The Triangle Setup - A complete defense against 1.d4 دانلود با لینک مستقیم و پرسرعت .

فیلم آموزشی شطرنج
راه اندازی مثلث - دفاع کامل در مقابل حرکت The Triangle Setup - A complete defense against 1.d4
آموزش بهترین دفاع در مقابل حرکت 1.d4
توسط استاد بزرگ میکا ل کراسکنوف
فرمت mp4
محصول chessbase 2015
شامل 27 ویدئویی آموزشی همراه با تست آزمون ها
5 ساعت و 29دقیقه

Michal Krasenkow: "The Triangle Setup - A complete defense against 1.d4": Review
By Paul Smith
In his new DVD the Polish Grandmaster, trainer and writer Michal Krasenkow makes the audacious claim of offering a complete defense against 1.d4. For a large part he lives up to that claim, delivering quality and detailed analysis of the many lines arising from his recommended repertoire that is based on the so-called “Triangle Defense”.
The DVD sets out to offer a repertoire for Black. But that being said, 1.d4 players like myself can learn a lot from this DVD. The name “Triangle” is a simple but smart choice as it is much more memorable than “Semi-Slav”, the official name of the line Krasenkow recommends.
There are two “Triangle” starting positions. In the most common White puts his Knight on f3 though Nc3 is also played from time to time.
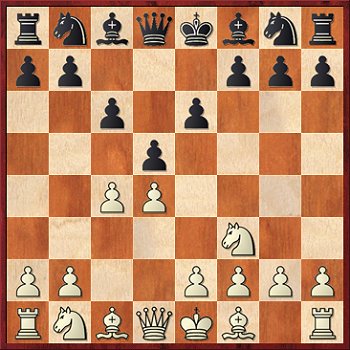
Black triangles, White's knight is on f3.
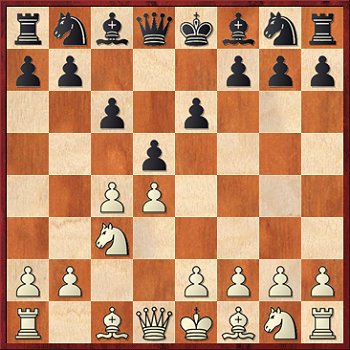
White put the knight on c3 - Black triangles.
لیست فیلمها
01_Intro.mp4
02_1.d4 d5 2.c4 e6 3.Nf3 c6 4.Bg5 Be7 5.Bxe7 Qxe7.mp4
03_1.d4 d5 2.c4 e6 3.Nf3 c6 4.Nbd2 f5.mp4
04_1.d4 d5 2.c4 e6 3.Nf3 c6 4.g3 dxc4 5.Bg2 b5_part 1.mp4
05_1.d4 d5 2.c4 e6 3.Nf3 c6 4.g3 dxc4 5.Bg2 b5_part 2.mp4
06_1.d4 d5 2.c4 e6 3.Nf3 c6 4.Qc2 dxc4 5.Qxc4 Nf6_part 1.mp4
07_1.d4 d5 2.c4 e6 3.Nf3 c6 4.Qc2 dxc4 5.Qxc4 Nf6_part 2.mp4
08_1.d4 d5 2.c4 e6 3.Nf3 c6 4.Qc2 dxc4 5.Qxc4 Nf6_part 3.mp4
09_1.d4 d5 2.c4 e6 3.Nf3 c6 4.e3_part 1.mp4
10_1.d4 d5 2.c4 e6 3.Nf3 c6 4.e3_part 2.mp4
11_1.d4 d5 2.c4 e6 3.Nf3 c6 4.e3_part 3.mp4
12_1.d4 d5 2.c4 e6 3.Nf3 c6 4.e3_part 4.mp4
13_1.d4 d5 2.c4 e6 3.Nc3 c6 4.e4_part 1.mp4
14_1.d4 d5 2.c4 e6 3.Nc3 c6 4.e4_part 2.mp4
15_Notebom_part 1.mp4
16_Notebom_part 2.mp4
17_Notebom_part 3.mp4
18_Notebom_part 4.mp4
19_Notebom_part 5.mp4
20_Notebom_part 6.mp4
21_Notebom_part 7.mp4
22_Notebom_part 8.mp4
23_Test position_8.mp4
24_Test position_9.mp4
25_Test position_10.mp4
26_Test position_11.mp4
27_Test position_13.mp4
بعد از پرداخت مبلغ مورد نظردر صفحه ای که مختص شما باز میشود بر روی لینک دانلود پر سرعت با حجم 248 مگابایت کلیک کنید
لینک دانلود در یک فایل فشرده هم به ایمیل شما ارسال خواهد شد
تحقیق/مقاله آماده مثلث تقلب مطابق با مدل ریسک حسابرسی با فرمت ورد(word)
اختصاصی از یارا فایل تحقیق/مقاله آماده مثلث تقلب مطابق با مدل ریسک حسابرسی با فرمت ورد(word) دانلود با لینک مستقیم و پرسرعت .

مفهوم مثلث تقلب در ادبیات حرفهای حسابداری و حسابرسی در بیانیه شماره SAS-99 تحت عنوان بررسی تقلب در سطح صورتهای مالی تعریف شده است. برهمین اساس مطابق با بیانیه مذکور مثلث تقلب دارای3 مفهوم در 3 ضلع یک مثلث بشرح زیر میباشد چرا که تقلب در سازمان زمانی رخ خواهد داد که عواملی همچون: 1- فشار/ تشویق، 2- فرصت، 3- نگرش، در سازمان مورد توجه قرار نگرفته باشد. اگرچه امروزه انجام تحقیقات توسط کارشناسان حرفهای، روانشناسان، انجمنهای دانشگاهی درخصوص ارزیابی عوامل تقلب رو به گسترش بوده است و نتایج بدست آمده بیانگر این موضوع است که حسابرسان حسب مسئولیت خود در زمینه تعیین و ارزیابی ریسک های خود در زمان انجام عملیات حسابرسی این 3 شرط (عامل) را میبایست مورد توجه و بررسی قرار داده و آنها را در مدل ارزیابی ریسک خود به تفسیر مورد توجه قرار دهند. هدف اصلی ما در این پژوهش ارائه یک مدل خطی از ریسکهای متحمله حسابرسی میباشد که با تقلب آمیخته هستند تا از این طریق به یک ترکیب منطقی از شواهد حسابرسی دست یابیم، در ارائه این مدل بدنبال آن هستیم که نتیجه برآورد ریسک به منظور ارائه مدلی که ریسک حسابرسی (ریسک مورد پذیرش حسابرس) را تقریباً در سطح 05/0یا کمتر محاسبه (اطمینان گزارشگری در سطح 95 درصد) و برآورد نماید و مهمتر اینکه بمنظور ارتقاء این مدل نیاز است که بوسیله ترکیب این عوامل با نیازمندیهای اعلام شده در پیشنویس جدید (AICPA 2002) در نظر گرفته شده برای تعدیل و اصلاح بیانیه شماره 82-SAS میباشد را مد نظر قرار دهیم.
فهرست :
مقدمهای بر مفهوم ریسک حسابرسی و تاریخچه آن
نتیجه گیری براساس شواهد اعتقاد ی عملکرد
نمونهگیری و تجزیه و تحلیل از مدل پایه
ارزشهای اعتقادی / باور بروی مدل پایه
اثر درستکاری مدیریت بر ریسک حسابرسی
مدل حسابرسی مبتنی بر ریسک مطابق با بیانیه شماره SAS-82
مثلث تقلب
نتیجهگیری
دانلود مقاله مثلث های رلو
اختصاصی از یارا فایل دانلود مقاله مثلث های رلو دانلود با لینک مستقیم و پرسرعت .

فرمت فایل : word(قابل ویرایش)
تعداد صفحات:16
فهرست مطالب:
مثلث های رلو
حرکت بدون تکان
استوانه های بیضی القاعده
ساده ترین منحنی غیر مدور
برای رسم
روتور واقع در یک مربع
کمترین مساحت
مارتین گاردنر
مثلث های رلو :
برای جابجا کردن یک جسم از چهار چرخه استفاده می کنیم ولی اگر جسم سنگین باشد ممکنست محور چرخها در اثر سنگینی جسم کج شده و یا بشکند. همانطور که اغلب دیده ایم برای حرکت دادن چنین اجسامی سنگینی بهتر است چند غلتک استوانه ای شکل (مثل لوله یا میله گرد قطور) را به موازات یکدیگر روی زمین قرار دهیم ، سپس یک صفحه محکم مسطح روی آنها بگذاریم و بعد جسم سنگین را روی این صفحه منتقل نمائیم ، با هل دادن این دستگاه ، صفحه با بارش روی استوانه ها غلتیده و به جلو خواهد رفت . ضمن حرکت باید هر یکاز استوانه ها را که به ترتیب از عقب دستگاه خارج می شوند برداشته و مجداَ در جلو صفحه روی زمین قرار دهیم .
اگر زمینی که دستگاه روی آن حرکت می کند مسطح باشد ، جسم بدون تکان و به محاذات خود خواهد رفت .
علت حرکت بدون تکان جسم اینست که مقطع استوانه ای چرخنده دایره است و دایره نیز به اصطلاح ریاضیدانان یک منحنی مسدود متساوی العرض می باشد که در نتیجه فاصله بین صفحه زیر جسم و زمین همیشه ثابت
می ماند .
اگر یک منحنی مسدود محدب رابین دو خط موازی محاط می کنیم به
طوریکه دو خط با دو سمت متقابل منحنی تماس حاصل می کنند ، فاصله بین دو خط موازی را عرض منحنی در جهت مفروض نامند .
طبق تعریف بالا یک بیضی دارای عرضهای مختلف در جهات مختلف می باشد و بر خلاف دایره ، متساوی العرض نیست .
حال اگر جسمی را روی تعدادی استوانه های بیضی القاعده قرار دهیم مسلماً به طور افقی حرکت نخواهد کرد و دایماً بالا و پایین خواهد جهید ، در حالیکه حرکت هموار همین جسم روی استوانه های با قاعده دایره بدین دلیل است که دایره دارای عرضهای مساوی در جهات مختلف می باشد و می توان آنرا بین دو خط موازی (یا دوصفحه موازی) چرخاند بدون اینکه لازم باشد
فاصله بین خطوط (و یا صفحات) را تغییر دهیم .
غالباً تصور می شود کهدایره تنها شکل هندسی است که در کلیه جهات متساوی العرض می باشد ، در حالیکه تعداد چنین منحنی هایی نامحدود بوده و هر یک از آنها می توانند به عنوان مقطعی از غلتکهای زیر جسم به کار روند و جسم را با نرمی و همواری به جلو رانند . این خود نمونه مثال کاملی است که نشان می دهد چگونه ممکنست تصورات ظاهری یک ریاضیدان باعث گمراهی و انحراف او گردد .
عدم اطلاع و شناخت چنین منحنی هایی نتایج اسف انگیزی در صنعت به بار می آورد ، بطور نمونه ممکنست در موقع ساختن یک زیربنای دریایی مدور ، فقط قطر مقاطعآنرا در جهات مختلف اندازه گرفته و کنترل کنیم . در حالیکه به سهولت مشاهده می شود بدنه چنین زیردریایی دارای ناهمواری های زیادی خواهد بود و هر چه با کنترل اقطار آن بخواهیم ناهمواریها را برطرف کنیم موفق نمی شویم .