آموزش متلب، جزوه آموزش تحلیل اجزاء محدود خرپای دو بعدی در نرم افزار MATLAB
اختصاصی از یارا فایل آموزش متلب، جزوه آموزش تحلیل اجزاء محدود خرپای دو بعدی در نرم افزار MATLAB دانلود با لینک مستقیم و پرسرعت .

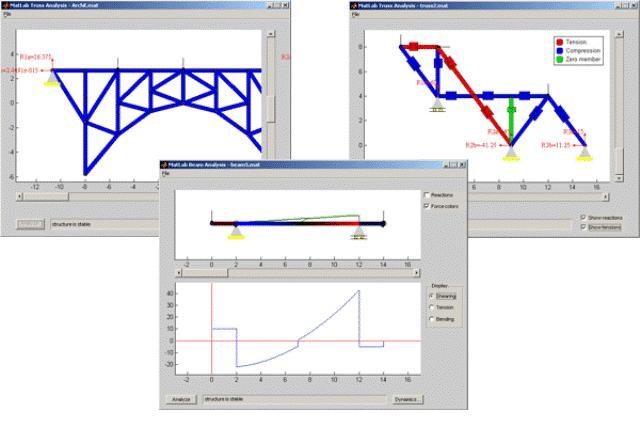
یکی از سازه های پر کاربرد مهندسی خرپاها می باشند. خرپا را به دو صورت دو بعدی و سه بعدی می توان بررسی نمود. اجزاء خرپا فقط می توانند نیروی کششی و فشاری در راستای محور خود را تحمل کنند و این اجزاء توسط پین های بدون اصطکاک به هم متصل شده اند. در استاتیک از روش مفاصل یا برش زدن و نوشتن معادلات تعادل می توان نیرو در هر المان را محاسبه نمود. در این جا با استفاده از روش اجزاء محدود ابتدا جابجایی در هر مفصل محاسبه شده و سپس تنش در هر المان بدست می آید. همچنین به سادگی می توان نیروی تکیه گاهی را نیز محاسبه نمود...
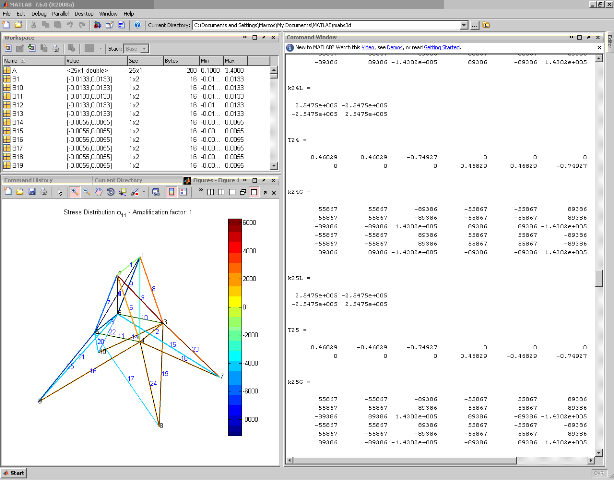
جزوه آموزش تحلیل اجزاء محدود خرپای دو بعدی در نرم افزار MATLAB، یک جزوه آموزشی مفید و کاربردی از آموزش مبحث تجزیه و تحلیل خرپاها در نرم افزار پیشرفته متلب است. همچنین به همراه جزوه بالا تمام m فایل های استفاده شده در این جزوه آموزشی، در فایل rar دانلود شده موجود می باشد. چون این برنامه دارای تابع می باشد، توجه شود که حتماً بایستی Current Folder نرم افزار بر روی فولدر این مجموعه تنظیم شود. این جزوه مشتمل بر 21 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، با فرمت PDF توسط مهندس همت آبادی به ترتیب زیر گردآوری شده است:
بخش 1: مقدمه
بخش 2: معادلات اجزاء محدود
- ماتریس سختی
- روابط تنش
- اصلاح ماتریس سختی و بردار جابجایی
بخش 3: صورت مسئله
بخش 4: برنامه MATLAB
- برنامه اصلی
- تابع محاسبه کسینوس هادی و طول المان (conductor)
- تابع محاسبه ماتریس سختی هر المان (element stiffness)
- تابع محاسبه ماتریس سختی کل (total stiffness)
- تابع محاسبه تنش در هر المان (element stress)
بخش 5: بررسی نتایج
بخش 6: اعمال جابجایی به عنوان شرایط مرزی
- صورت مسئله
- برنامه MATLAB
- بررسی نتایج
بخش 7: تمرین
جهت خرید جزوه آموزش تحلیل اجزاء محدود خرپای دو بعدی در نرم افزار MATLAB به مبلغ فقط 3000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر فروشگاه ها و محصولات آن ها مقایسه نمایید!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.
آموزش آباکوس، جزوه آموزش تحلیل اجزاء محدود خرپای فضایی در نرم افزار ABAQUS
اختصاصی از یارا فایل آموزش آباکوس، جزوه آموزش تحلیل اجزاء محدود خرپای فضایی در نرم افزار ABAQUS دانلود با لینک مستقیم و پرسرعت .

تحلیل مهندسی شامل ۳ روش عمده به نام های: تحلیلی، عددی و تجربی می باشند. روش های تحلیلی روش هایی می باشند که منجر به یافتن حل دقیق به صورت پیوسته در دامنه حل می گردند. یافتن چنین روش هایی برای تمام مسائل امکان پذیر نمی باشد. روش های تجربی نیز بخش مهمی از تحلیل های مهندسی را تشکیل داده اند اما به علت هزینه بر بودن و سختی های آزمایشگاهی، همواره امکان استفاده از آن ها وجود نخواهد داشت. لذا در این میان، روش های عددی بخش ناگزیری از تحلیل های مهندسی را تشکیل داده اند. تحلیل المان محدود نیز از جمله تحلیل های عددی می باشد که آشنایی و شناسایی روش های المان محدود بسیار مهم می باشد. امروزه المان محدود به عنوان روشی ضروری و حیاتی برای تحلیل های سازه ای (اعم از ساده و پیچیده)، تحلیل های انتقال حرارت، تحلیل های الکترومغناطیس و غیره پذیرفته شده است. از این رو، شناخت مفاهیم اولیه و نیز آشنایی با برنامه نویسی المان محدود برای تحلیل های مهندسی از اهمیت بسزایی برخوردار است. همچنین مباحث اجزاء محدود و تحلیل غیر خطی سازهها توجه بسیاری از محققین این رشته را به خود جلب نموده است، چرا که اولا استفاده از کامپیوتر جهت صرفه جویی در زمان تحلیل و ثانیا بهره گیری از حداکثر توانایی مصالح از اهداف اصلی مهندسین محاسب میباشد...
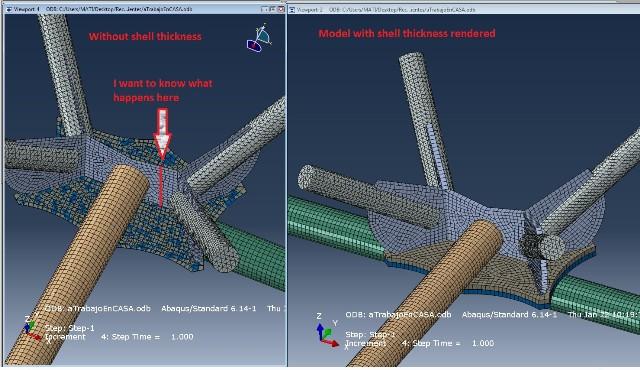
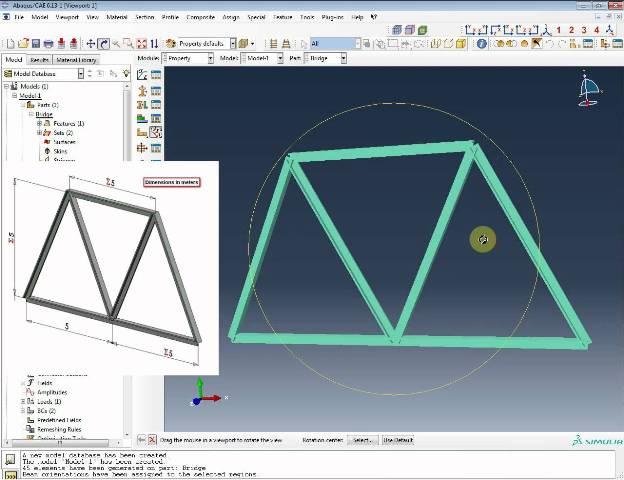
جزوه آموزش تحلیل اجزاء محدود خرپای فضایی در نرم افزار ABAQUS، یک جزوه آموزشی مفید و کاربردی از آموزش مبحث تجزیه و تحلیل خرپاهای فضایی در نرم افزار تحلیلی آباکوس است. این جزوه مشتمل بر 26 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، با فرمت PDF، به ترتیب زیر گردآوری شده است:
- بیان مسئله
- فرضیات مسئله
- مدلسازی مسئله
- تعریف مشخصات مصالح
- مونتاژ مدل
- تعریف مراحل تحلیل
- بارگذاری و شرایط تکیه گاهی
- مش بندی
- ایجاد یک Job
- پردازش مدل
جهت خرید جزوه آموزش تحلیل اجزاء محدود خرپای فضایی در نرم افزار ABAQUS به مبلغ فقط 3000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر فروشگاه ها و محصولات آن ها مقایسه نمایید!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.
دانلود نمونه صورتجلسات تغییرات در شرکتهای با مسئولیت محدود
اختصاصی از یارا فایل دانلود نمونه صورتجلسات تغییرات در شرکتهای با مسئولیت محدود دانلود با لینک مستقیم و پرسرعت .

لیست صورت جلسات را که به صورت ورد و قابل ویرایش می باشد می توانید در ادامه مطلب مشاهده نمایید.

- نمونه صورتجلسات تغییر محل با مجمع عمومی فوق العاده
- نمونه صورتجلسه تغییر محل شرکت با هیأت مدیره
- نمونه صورتجلسه تغییر نام شرکت
- نمونه صورتجلسه کاهش سرمایه شرکت
- نمونه صورتجلسه افزایش سرمایه شرکت
- نمونه صورتجلسه افزایش سرمایه همراه با ورود شرکت جدید
- نمونه صورتجلسه کاهش سرمایه همراه با خروج شریک
- نمونه صورتجلسه تغییر موضوع یا الحاق مواردی به موضوع شرکت
- نمونه صورتجلسه نقل و انتقال سهم الشرکه
- نمونه صورتجلسه تعیین سمت هیأت مدیره و حق امضاء در شرکت های مسئولیت محدود
- نمونه صورتجلسه هیأت مدیره در خصوص انتخاب و تعیین سمت اعضاء هیأت مدیره و تعیین دارندگان حق امضاء در شرکت
- نمونه صورتجلسه تبدیل نوع شرکت با مسئولیت محدود به سهامی خاص
- نمونه صورتجلسه انحلال شرکت با مسئولیت محدود
- نمونه صورتجلسه تأسیس شعبه شرکت در شهرستانها
- نمونه نامه ختم تصفیه
- نمونه آگهی دعوت از شرکاء جهت تشکیل مجامع عمومی فوق العاده و عادی بطور فوق العاده در شرکتهای سهامی خاص به طور همزمان
- آگهی دعوت از سهامداران/ شرکاء
- نمونه صورتجلسه در خصوص کاهش/ افزایش تعداد اعضاء هیأت مدیره در شرکتهای با مسئولیت محدود
پایان نامه فراهم سازی مسیر های شبکه جاده ای محدود کننده جابه جایی ها به صورت زمینه سرویس موبایل
اختصاصی از یارا فایل پایان نامه فراهم سازی مسیر های شبکه جاده ای محدود کننده جابه جایی ها به صورت زمینه سرویس موبایل دانلود با لینک مستقیم و پرسرعت .

فرمت فایل : word(قابل ویرایش)
تعداد صفحات:75
فهرست مطالب:
-1-مقدمه:
اهداف تحقیق:
ساختار تحقیق:
2.ساختار سیستم
1-2: طرفهای ایستگاه پردازش و سرور
2-2:عاملیت ثبت مسیر
2-2-1تعامل ایستگاه پردازش و سرور
2-2-3ثبت مسیر از طرف سرور
3.مسیرها وشبکه های جاده ای
تعریف 1-3 : تابع(طول):
تعریف2-3 :subpolyline(زیر- چند خطی).
تعریف3-3 : (ارتباط).
تعریف 4-3 (شیء مقصد):
تعریف 5-3 (زمان کاربری):
تعریف 6-3 (مسیر):
4. روش های ساخت مسیر:
1-4- : شناسائی پلی لاین:
الگوریتم 1-4: محاسبه پارامتر های تصویر(تابع Calc param).
نقطه GPS ابتدایی :
نقطه های GPS متعاقب (subsequent GPS points):
4.2شکل عناصر مسیر (جاده)
3-4 ایجاد مسیر
4.3.1 ایجاد عناصر مسیر
4.3.2 کشف شروع مسیر
3.3.4 پر کردن شکاف های بین طرح ها
4.3.4 تقریب پایان مسیر
5-راه اندازی سیستم:
1-5ذخیره اطلاعات در بخش کاربر
2-5دورنمای اطلاعات اصلی
3-5) بررسی اجرایی
6) اعتبار تجربی
1-6) ثبت نقاط مختصات جغرافیایی و ترسیم:map &GPS log data
2-6) بینش ها و فهم تجربی
7) کارهای مرتبط
8) خلاصه وکارهای آتی
References
1-مقدمه:
نرخ پذیرش جهانی تلفن سیار بسیار وسیع است ودر حالیکه اخیرا"تلفن های همراه عمدتا"برای ارتباطات صوتی مورداستفاده قرار می گیرند حجم داده های ارتباطی در حال افزایش است.با فن آوری هایی از جمله GPRS,2.5G,3Gکاربرمیتواند همیشه هزینه اضافی پرداخت نکرده و پهنای باند هم در حال افزایش است.
با ظهور سیستم ناوبری جهانی ماهواره گالیله وهمچنین پیشرفت های تنظیم قانون از جمله فرمان USE911وپیشرفتهای مشابه در آسیا واروپا موجب افزایش دسترسی توانمندیهای موقعیت یابی شده است.بنابر این یک ساختار زیر بنایی در حال ظهور است که دامنه ای از خدمات موبایل مستقیم در محل را پشتیبانی می کند.
با وجود این سرویس های موبایل به وسایلی منتقل می شوند که به طور معمول بدون صفحه کلید بوده و فقط صفحه نمایش هایی کوچک دارند.بعلاوه ممکن است از این سرویس ها انتظار رود در موقعیت هایی انتقال پیدا کنند که نقطه توجه اصلی کاربر به سرویس نیست بلکه بیشتر فی المثل به ناوبری ایمن در عبور و مرور است.به این دلایل نسبت به یک موقعیت محاسباتی کامپیوتر رومیزی اهمیت بسیار بیشتری دارد که کاربر فقط اطلاعات و سرویس مربوطه را با حداقل تعامل ممکن با سیستم دریافت کند.یک شیوه جهت کسب این مقادیر اطلاعات مطلع ساختن از زمینه کاربر است.یک زمینه احتمالی موقعیت فعلی کاربر است و دیگری مقصد کاربر است.در عین حال دیگری مسیر کاربر از موقعیت فعلی تا مقصد است.تحقیق حاضر بر این موضوع متمرکز شده است.
مسیر ها به دو دلیل قابل توجه هستند نخست عقل سلیم حکم میکند کاربران موبایل به طور معمول به سوی یک
مقصدسفر کنند (به جای این که بی هدف پرسه بزنند)واینکه هنگامی که کاربر از جایی به جایی دیگر میرود اغلب یا به طور معمول مسیر مشابهی را طی می کند.به عنوان مثال یک کاربر به طور معمول از خانه به محل کار میرود.دوم اینکه مسیر ها به عنوان زمینه برای انواع سرویس ها اهمیت دارند.فی المثل سرویسی که از مسیر کاربر اطلاع دارد ممکن است به کاربر در مورد شرایط مسیر هشدار دهد مثلا":ازدحام و ساخت و سازوتصادف های مسیر در حالیکه کاربررا با شرایطی که مربوط به مسیر او نیستند آزار نمی دهد. به عنوان مثالی دیگر ممکن است هنگامی که یک کاربر در مورد محل هایی جالب توجه که مجاور هستند درخواست کند از مسیر ها استفاده میشود.
به ویژه ممکن است یک سرویس به جای اینکه صرفا"رستوران ها و پمپ بنزین های نزدیک موقعیت فعلی کاربر
راپیشنهاد کند موقعیت آنها در مسیر را اطلاع دهد .همچنین میتوان از اطلاعات مسیر های کاربران موبایل در خدمات رد گیری استفاده کرد تا موفق به ردگیری موثر تر کاربران شوند .
اهداف تحقیق:
این تحقیق تکنیک های اصلی موجود در یک نرم افزار را شرح می دهد تا بر اساس ردگیری موقعیتGPSمسیر های هر کاربر را میسازد. این مسیر ها به عنوان توالی های قسمت های جاده همراه با جهت های رانندگی مدلسازی میشوند ..هرمسیر یک شروع را به یک مقصد متصل مینماید.هر مقصد متعلق به یک کاربر است.مسیرها به وسیله داده های مبنااز جمله زمان های استفاده مربوط میشوند.اطلاعات تجمعی کاربرد هر مسیر نگهداری میشوند.در ساختار سیستم طرح شده یک ایستگاه پردازش کوچک مسئول با کاربر در تعامل است تا اطلاعات فیلتر شده را به سرور بفرستد و واطلاعات را از سرور دریافت کند.ایستگاه های کوچک پردازش توالی های قسمت های جاده را نگهداری نمی کنندزیرا از زیرساخت حمل ونقل نیابت ندارند بلکه بیشتر مسیرها را به مقاصد مورد نظر واطلاعات کاربردی مربوط میکنند .سرور از ارجاع خطی جهت بدست آوردن زیر ساخت موجود در حمل ونقل وبدست آوردن مسیر ها استفاده می کند.این تحقیق سناریوهای ممکن جهت تعامل ایستگاه پردازش- سرور را پوشش میدهد.
در این ساختار کاربران ثبت مسیر را کنترل می کنند .مسائل مربوط به ساختن مسیر حاصل از موقعیت های GPS
تحلیل شدند.الگوریتم هایی که مسائل را حل میکنند بصورت مشروح پوشش داده شدند.این ها شامل الگوریتم هایی
جهت تطبیق نقشه ای, ساخت عناصر مسیر, تقریب عناصر مسیرو پرکردن شکاف ها می باشند.این مولفه با استفاده
ازJAVA,ORACLEPL/SQL, واوراکل فضایی اجرا میشود.اثبات مفهوم آزمایشاتی که از سوابق سیستم موقعیت جهانی استفاده می کنند از وسایل نقلیه موجود دریک منطقه وبا استفاده از یک شبکه جاده ای برای این منطقه بدست آمد.مولفه مطرح شده را میتوان در سیستم های بزرگ مورد استفاده قرار داد که سرویس های موبایل را تدارک می بینند .چنین سیستم هایی میتوانند مسیرهای کاربر را در خواست کنند تا بر مبنای زمان وموقعیت فعلی حرکت او را پیش بینی کنند تا شرایط ترافیکی مربوطه را کنترل کنند , پارکینگ پیدا کنند و... .
ساختار تحقیق:
این تحقیق به صورت زیر ساختار بندی شده است.ساختار سیستم ومولفه ثبت مسیر در بخش دوم شرح داده شده اند.ساختار ضروری داده ها جهت بدست آوردن مسیرهااز جانب سرور در بخش سوم موجود است و والگوریتم های اصلی مورد استفاده این مولفه جهت ثبت مسیرها در بخش چهارم پوشش داده شده اند. اعمال مولفه ثبت مسیردر
بخش پنجم شرح داده شده است.بینش هایی از یک تصدیق آزمایشی در بخش ششم گزارش شده اند. بخش هفتم تحقیق مربوطه را پوشش می دهد وبخش هشتم خلاصه سازی کرده وجهت هایی برای کار آتی پیشنهاد میکند.یک پیوست الگوریتم مسیر یابی مورد استفاده از تکنیک های ارائه شده در قسمت اصلی تحقیق را ارائه می کند.
دانلود مقاله A2.4.3 آنالیز المان محدود تقریبی
اختصاصی از یارا فایل دانلود مقاله A2.4.3 آنالیز المان محدود تقریبی دانلود با لینک مستقیم و پرسرعت .

فرمت فایل : word(قابل ویرایش)
تعداد صفحات:26
چکیده:
محاسبات المان محدود در مدل برش صفحه ی برش نشان داده در شکل A2.4 به کار برده می شود . در این نوع تقریب ، هیچ گونه منبع گرمایی حجم درونی q* به چشم نمی خورد ؛ این در حالی است که منابع سطوح داخلی qs و qf در سطح اولیه ی برش و در عین حال در سطوح مشترک تراشه / ابزار وجود دارد . در خصوص انجام ارزیابی های آزمایشی بر سطوح برش ، زاویه ی سطح برش و هم چنین طول تماس تراشه / ابزار ، مولفه ی qs و میانگین ارزش مولفه ی qf در روابط ذیل مشخص می شوند :
که مولفه های مذکور از روابط ذیل حاصل می شوند :
به طور کل چنین فرض می شود که مولفه ی qs یک مقدار ثابت و یکنواخت در سطح اولیه ی برش به شمار می رود ؛ اما با این وجود ، به نظر می رسد مولفه ی qf در طیف وسیعی از توزیعات به کار گرفته شود ؛ در این راستا می توانید به مثلث نشان داده شده در شکل A2.4 رجوع نمایید .
A2.4.4 توسعه ی شرایط ناپایدار و گذرا
معادله ی ( A2.18 ) از لحاظ کاربردی پشتیبان محاسبات درجه حرارت ناپایدار می باشد ، البته در
صورتی که مولفه ی q* توسط عبارت جایگزین گردد ؛ در نتیجه ، معادله ی المان محدود ( A2.20a ) منجر به شکل گیری رابطه ی ذیل خواهد گردید :
شکل A2.4 شرایط کرانی گرمایی در نمونه ی سطح برشی براده برداری
هم چنین رابطه ی ذیل را نیز شاهد خواهیم بود :
( در رابطه ی فوق مولفه ی [ C ] اشاره به 4 گره چهار وجهی دارد ) .
با گذشت زمان ، فاصله ی ∆t تفکیک کننده ی دو زمان با مولفه های متغیر tn و tn+1 محسوب می شود ؛ در حالی که مقادیر میانگین نسبت های گرهی تغییرات دما را می توان در دو رابطه ی ذیل بیان نمود :
و یا رابطه ی ذیل :
در رابطه ی فوق ، مولفه ی معادل کسر متفاوت بین ارقام 0 و 1 می باشد که در عین حال فشار وارد آمده بر مقادیر اولیه و نهایی نسبت های متفاوت تغییر درجه حرارت را تایید می نماید . هم چنین پس از معادلات چند منظوره ( A2.31 ) با توجه به مولفه ی [ C ] و جایگزین نمودن مولفه های [ C ] { ∂ T / ∂ t } در معادله ی ( A2.31a ) برای مقادیر ( { F } – [ H ] { T } ) از معادله ی ( A2.30 ) که معادل معادلات ( A2.31a ) و ( A2.31b ) می باشد و با مرتب نمودن مجدد این معادلات ، معادله ای در جهت درجه حرارت در زمان tn+1 بر حسب دما در مولفه ی tn شکل می گیرد :
و در فرآیند مونتاژ جامع و یکپارچه رابطه ی ذیل را پیش رو خواهیم داشت :
در واقع ، روابط فوق برآیند استاندارد در آزمایشات المان محدود ( به طور نمونه ، HUEBNER و THORNTON در سال 1982 ) به شمار می روند . در عین حال نیز محاسبات پله ای زمان در رابطه ی θ ≥ 0.5 یک مقدار ثابت می باشد . هم چنین فشار برابری در نقطه ی شروع و پایان تغییرات دمایی = 0.5 ) θ( تحت عنوان شیوه ی CRANK – NICOLSON ( البته پس از بنیانگذاران این تکنیک ) شناخته می شوند که نتایج مطلوب آن را می توان به وضوح در محاسبات انتقال گرمایی برش فلزات مشاهده نمود .