آنالیز طراحی و برنامه های کاربردی لیزر بال بار برای دقت کالیبراسیون ماشینهای چند محور
اختصاصی از یارا فایل آنالیز طراحی و برنامه های کاربردی لیزر بال بار برای دقت کالیبراسیون ماشینهای چند محور دانلود با لینک مستقیم و پرسرعت .

آنالیز طراحی و برنامه های کاربردی لیزر بال بار برای دقت کالیبراسیون ماشینهای چند محور
22 صفحه در قالب word
چکیده :
روشهای معمول برای اندازه گیری خطای حجمی از مختصات دکارتی ماشین ابزار با استفاده از یک گام سنج یا تداخل سنج لیزر وقت گیر است. برای ماشینهای چند محور که اسپیندل مستواند نوسان کند, کالیبراسیون خطای حجمی حتی سختتر است.
در این تحقیق یک لیزر بال بار سه بعدی جدید (3D-LBB) برای راهاندازی و اندازهگیری سریع موقعیت ابزار نسبت به میز کار در هر نقطه کاری از ماشین چند محور توسعه داده شده است.دستگاه شامل استفاده از یک لیزر بال بار و دو انکودر لیزری دورانی برای تشخیص مسیر هدف در سیستم مختصات کروی است. طراحی ابزار مورد بحث است و ویژگیهای خطا برای ارتقاء دقت دستگاه تجزیه و تحلیل شدهاند.برنامههای کاربردی برای اندازهگیری خطای حجمی یک روبات و دو نوع از ماشین ابزار ,قابلیت دقت بالای لیزر بال بار سه بعدی را نشان میدهد.
معرفی
تکنیک انجام تست دقت ماشین ابزار CNC میتواند در خیلی از استانداردها مانندISO230 یا ASME B5.54(1993) یافت شود.اکثر ابزارهای اندازهگیری خطی موجود تک بعدی هستند. مانند تداخل سنج لیزر یا گام سنج. برای تست دایرهای در حرکت دو بعدی به طور مشخص در ISO230-4(1998) آمده است.بعضی ابزارها مانند دابل بال بار (DBB) توسط(Bryan1982) و (Burdekin و jwye 1992) ودر آخرین لیزر بال بار
(LBB) توسط (Ziegert و Mize , Schmitz و Ziegert 2000 ) توسعه داده شدند. اگرچه این ابزار ها قادر به اندازهگیری خطای دو محور هستند اما آنها هنوز تنها به یک بعد حساس هستند.
برای اندازهگیری خطای حجمی ماشین ابزار,روشهای زیادی برای تشخیص 21 خطای جزئی وجود داردو سپس از روش ماتریس انتقال همگن (HTM) یا روش آنالیز حرکتی (Soons,Theuws,و Schellenkens 1992) برای خطاهای فضایی در حالت خاموشی خط (OFF-LINE) استفاده میکنند.وانگ , در سال 2000 مطابق استاندارد ASME B5.54 برای اندازهگیری خطای حجمی به طور مستقیم عمل کرد. استاندارد یک لیزر داپلر تغییر مکان سنج (LDDM) و یک آینه تخت بزرگ برای اندازهگیری چهار قطر بدنه و ارزیابی خطای حجمی با استفاده از روش برداری را بکار میگیرد.استاندارد صرفه جویی در زمان است اما تنها برای سختی ماشینهای cnc نوع سریالی معتبر است.
ماشین ابزار های شش محور برای انعطاف پذیری در پنج محور حرکتی توجه بیشتری را جلب میکنند
(Patel و Ehman 1997). به هر حال با توجه به نوسان اسپیندل در جهات Pitch و yaw بیشتر سنسورها نیازمند به ایجاد امکان اندازهگیری حرکت حجمی هستند. (Parenti و Gregorio 1999) . به هر حال در عمل این تجهیزات برای اجرا در صنعت خیلی گران قیمت هستند . تا کنون بعضی سیستم های ردیابی لیزری خوب (LTSs) طراحی شده در سیستم مختصات کروی وجود دارد که مستقیما میتواند خطای حرکت سه بعدی را تشخیص دهد. (API 2002) . این سیستم در یک مسیر فعال در حال کار باید اجرا شود که نیاز به سنسور بازخورد و سرو کنترل برای ردیابی زمان واقعی هدف در حال حرکت دارد.این سیستمها نیاز به سیستمهای کنترل خیلی سریع و در نتیجه هزینه خیلی زیاد دارند.
یک طراحی جدید که مزایای LBB و LTSs را ادغام میکند در این تحقیق برای اندازهگیری سه بعدی اجسام در حال حرکت در زمان واقعی آمده است . این سیستم لیزر بال بار سه بعدی (3D-LBB) نام گذاری شده که بر اساس اصل مختصات کروی شامل تنها یک دستگاه اندازهگیری خطی لیزری دقیق و دو انکودر چرخشی لیزری دقیق در حلقه پایه با یک بال بار قابل تغییر طول میباشد. در این صورت یک چنین سیستمی میتواند با یک کلگی مغناطیسی توسط هر هدف در حال حرکت سه بعدی تغییر طول دهد و حرکت آزادانه در فضا داشته باشد .این سنسورها به طور همزمان موقعیت گوی را ضبط کرده و تبدیل به مختصات دکارتی در زمان واقعی میکنند.سیستم توسط یک تداخل سنج لیزری HP کالیبره میشود که دقت سیستم میتواند جبران شده باشد و به درجه بالاتری ارتقاء یابد. از آنجائیکه این سیستم در حالت غیر فعال در فضای سه بعدی اجرا شده, هزینه ارزان است.
اصل طراحی لیزر بال بار سه بعدی (3D-LBB)
طراحی سازه
شکل 1 پیکربندی سیستم 3D-LBB را نشان میدهد. سیستم در مختصات کروی ساخته شده که مرکز نصب حلقه مبدا (O) است.لوله تلسکوپی قابل تغییر طول (ساخته شده از الومینیوم الیاژی سخت کاری شده در سطح داخلی) روی مرکز حلقه نصب شده که میتواند بسته به طول شعاع حرکت در دو یا سه بخش طراحی شده باشد. بین لوله داخلی و خارجی در یک جفت کشویی یک یاتاقان خطی در انتهای لوله خارجی و یک یاتاقان کشویی کوپر(مسی) در نزدیکی انتهای لوله داخلی به صورت ثابت برای جلوگیری از حرکت جانبی در هنگام تغییر طول میله نصب شده است.
حرکت 3D-LBB بوسیله انتهای دقیق گوی ایجاد میشود که میتواند توسط یک سوکت مغناطیسی که با هر جسم در حال حرکتی حمل میشود کشیده شده باشد.حرکت شعاعی گوی (R) توسط یک سیستم اندازهگیری خطی لیزری سایز کوچک مشخص شده که پرتو از میان لوله تلسکوپی عبور میکند و بوسیله یک بازتابنده (رفلکتور) در انتهای میله به عقب بازتابیده میشود .یک قطعه فولاد ضد زنگ مخروطی بازتابنده و میله را به هم متصل میکند که اجازه چرخش زاویهای وسیعتر بین سوکت مغناطیسی و میله را میدهد. برای کاهش وزن سیستم یک سیستم لیزر خطی ممکن است خیلی کمتر مورد نیاز باشد . این طرح ما بود. بنابراین به یک مغیاس فشرده لیزر داپلر ( مدل 109N LDS ساخته شده توسط شرکت Optodyne ) با ثبات طول موج تا 0.1ppm و دقت سیستم تا 1.0ppm تغییر داده شد.
حرکت Picth (θ) و yaw (Ф) در میله با توجه به پایه حلقه توسط دو انکودر دوار لیزری دقیق (مدل k-1 ساخته شده توسط شرکت کانن ) مشخص شده است. هر انکودر مغیاس خیلی خوب از 81,000 ppr با یک برد تقسیم داخل کننده
(interpolator ) 16-di (مدل 2-16 ) اضافه دارد که رزولوشن میتواند به یک آرک در ثانیه (arc-sec ) برسد.
ممکن است هنگام انتقال از فایل ورد به داخل سایت بعضی متون به هم بریزد یا بعضی نمادها و اشکال درج نشود ولی در فایل دانلودی همه چیز مرتب و کامل است
متن کامل را می توانید در ادامه دانلود نمائید
چون فقط تکه هایی از متن برای نمونه در این صفحه درج شده است ولی در فایل دانلودی متن کامل همراه با تمام ضمائم (پیوست ها) با فرمت ورد word که قابل ویرایش و کپی کردن می باشند موجود است
بار و آیین های درباری در ایران اسلامی با تکیه بر دوره صفویه
اختصاصی از یارا فایل بار و آیین های درباری در ایران اسلامی با تکیه بر دوره صفویه دانلود با لینک مستقیم و پرسرعت .

پایان نامه کارشناسی ارشد تاریخ
گرایش ایران اسلامی
211 صفحه
چکیده:
با شکل گیری یک نظام سیاسی برخی قواعد و لوازم برای قوام و دوام آن لازم می باشد. یکی از این ملزومات ، آیین های درباری و مهم ترین آن ها «آیین بار دهی شاهانه» است. به طوری که نظام بار گستردگی به درازای عمر تاریخ سیاسی حکومت ها دارد که گستره ای غیر منقطع اما کج دار و مریز بر احوال آن جاری بوده است. در اهمیت آن همین نکته بس که در زبان فارسی کاخ شاهی را «بارگاه » و «دربار» می نامند. پس هرجا پادشاهی بوده به ناچار تشریفات باردهی شاهانه نیز جبراً و منطقاً بایستی وجود داشته باشد.
این تشریفات درواقع بازخورد و نقطه انعکاسی از احوالات درونی یک حکومت خبر می داده است. بدین معنا که حکومت ها در این تشریفات، فرهنگ غالب و اصیل خود و ارزش های مورد تفوق جامعه خود را نشان می دادند. تنوع و گستردگی انواع قدرت های حاکمه به تبعِ خود، تشریفات گوناگون و متنوعی را نوید می داد که مسلماً با دوران قبل و بعد از خود متغییر بوده است؛ اما این بدان معنا نیست که اصل و ماهیت این نظام تشریفات از بیخ و بن تغییر یابد بلکه تنها ظواهر امر از حکومت و یا قدرتی به حکومت و قدرت دیگری فرق می کرد.
این کار بر آن است تا قواعد و مراتب این آیین ها را در طول تاریخ ایران با تکیه بر دوره صفویه را بیان دارد و از سویی میزان تأثیر عوامل گوناگون در حکومت ها از جمله اوضاع اقتصادی، دینی، اجتماعی، خاستگاهی و.... بر نوع اجرای و کیفیت اجرای این مراسم را بیان دارد.این کار به روش پژوهش تاریخی و توصیفی و تحلیلی انجام شده است.
واژه های کلیدی: بارعام، بار خاص، دربار، ایران، صفویه
طراحی و ساخت برد کنترل جهت اضافه بار و اندازه کیری وزن
اختصاصی از یارا فایل طراحی و ساخت برد کنترل جهت اضافه بار و اندازه کیری وزن دانلود با لینک مستقیم و پرسرعت .

فرمت فایل : word(قابل ویرایش)تعداد صفحات:60
پیشگفتار
یکی از مهمترین قطعات مورد تاکید در استانداردهای جهانی سیستمهای آسانسوری، برد کنترل اضافه بار میباشد. وظیفه این برد اندازهگیری بار ورودی به کابین، مقایسة آن با ظرفیت مجاز و ارسال پیامهای مناسب به برد کنترل مرکزی آسانسور میباشد.
مزیت استفاده از این سیستم در درجة اول تأمین امنیت جانی و جلوگیری از سقوط کابین و در درجه دوم کاهش هزینههای نگهداری و تعمیرات موتور در اثر استفاده نادرست از آسانسورها میباشد.
متاسفانه به دلیل هزینة سنگین بردهای وارداتی و عدم تمایل سازندگان داخلی به تولید مشابه داخلی به دلیل ماهیت چند تخصصی (Multi- Discplinary) تولید که مستلزم به کارگیری چند تخصص برای تولید مجموعة برد دیجیتال و ساخت قطعة مکانیکی مورد استفاده در ساختمان آسانسور و نیز سنسورهای مورد نیاز، استفاده از بردهای کنترل اضافه بار در استانداردهای ایران، اجباری شده است. هدف از پروژه حاضر، طراحی و ساخت برد کنترل اضافه بار میباشد.
وردی این برد، سیگنال الکتریکی حاصل از تنش سنسور strain guage متصل به قطعة مکانیکی مخصوصی میباشد که نمونة آن در شکل زیر نشان داده شده است.
سیگنال ورودی که حاصل از تنش سنسور میباشد پس از تقویت و نمونه برداری وارد کنترل کننده میگردد. در کنترل کننده عمل تصمیم گیری نسبت به ارسال پیامهای foll load و over load متناسب با ظرفیت کابین و همچنین فعال شدن آلارم، انجام میشود.
بر ای تنظیم حداکثر مقادیر مجاز از پانل تنظیم دستی استفاده میشود. که شامل نمایشگر مناسب برای نمایش اعداد و پیغامهای لازم برای کاربرد و صفحة کلید برای ورد اطلاعات مربوط به تعداد نفرات مجاز و غیره میباشد.
برای طراحی این برد دیجیتالی ابتدا باید یک میکرو کنترلر مناسب در نظر گرفته شود و سپس سیستم طراحی شده توسط سخت افزار تحقق پیدا کند، برای این منظور یک بلوک دیاگرام کلی مطابق شکل زیر فرض میشود.
در بلوک دیاگرام فوق سنسور وظیفة تولید سینگنال آنالوگ ایجاد شده از تغییرات وزن کابین آسانسور را به عهده دارد تقویت کنندهای که بعد از سنسور قرار دارد. سیگنال ایجاد شده را تقویت می کنند و آن را برای عملیات کنترلی آماده میسازد و بعد از ا“ نیز میکروکنترلر قرار داده شده که عمل کنترل کننده را انجام میدهد.
بلوکهای ذکر شده در بالا همگی توسط سختافزار بر روی کارت تحقق پیدا میکند بطوریکه سنسور وزن را که یک سیگنال آنالوگ است تشخیص میدهد و آن را به A/D منتقل میکند . سیگنال آنالوگ به سیگنال دیجیتال تبدیل می شود و سپس بوسیلة میکروکنترلر، کنترل دیجیتال روی آن صورت میگیرد. سیگنالهای خروجی دیجیتال میباشند و برای تولید پیامهای over load و full و آمار به کار میروند.
در فصلهای بعدی به بررسی کاملتر مباحث ذکر شده، جزئیات کار و طراحی کنترلر پرداخته می شود که مباحث ارائه شده به صورت زیر طبقه بندی میشوند:
در فصل اول به معرفی سنسور strain guage و اساس کار آن و معیارهای انتخاب سنسور و آرایش مداری آن میپردازیم.
در فصل دوم به اتصال فیزیکی سنسور ۸-G و طراحی مکانیکی المان اندازهگیری وزن پرداخته میشود.
فصل سوم به طراحی و ساخت تقویت کننده صنعتی برای S.G پرداخته خواهد شد.
فصل چهارم به طراحی و ساخت برد دیجیتال کنترل بار میپردازیم
در فصل پنجم، ساختار کلی برنامه میکروکنترلر ارائه خواهد شد.
در فصل ششم نیز تحقق عملی پروژه، نتایج و پیشنهادات ارائه خواهد شد.
فصل ۱:
معرفی سنسور strain Gauge
۱-۱: مقدمه:
یکی از روشهای متداول در اندازهگیری وزن استفاده از سنسورهای S-G میباشد. اساس کار این سنسورها همانطور که توضیح داده خواهد شد بر تغییر طول یک المان الکتریکی و در نتیجه تغییر مقاومت الکتریکی آن استوار است. در این فصل به معرفی اساس کار، آرایشهای مداری سنسور و نیز معیارهای انتخاب سنسور مناسب خواهیم پرداخت.
۱-۲: اساس کار سنسور S-G :
مقاومت الکتریکی هر المان فیزیکی متناسب با طول آن المان میباشد. یعنی یا به طور دقیقتر که در آن L طول المان و A سطح قطع آن میباشد. و اگر طول یک المان فیزیکی به هر دلیلی تغییر کند مقاومت الکتریکی آن دچار تغییر خواهد شد. این مطلب اساس کار سنسورهای S-G میباشد.
این سنسورها معمولاً به صورت چاپ شده میباشند. که نمونهای از آنها در شکل زیر نمایش داده شده است.
همانطور که ملاحظه می شود و چاپ سنسور به صورت مارپیچ انجام شده در نتیجه امکان تغییر طول کلی سنسور بسیار افزایش یافته است به این معنی که با تغییر طول در هر یک از قطعههای افقی و با فرض اینکه تعداد این قطعهها n میباشد. تغییر طول کلی بربر خواهد بود.
برای تبدیل تغییرات وزن به تغییر طول در سنسور لازم است از یک المان مکانیکی استفاده شود. که نمونهای از آن در شکل زیر نشان داده شده است.
نقش المان مکانیکی تبدیل نیروی که ناشی از وزن است به نیروی میباشد تغیر نیروی باعث تغییر انحنای المان می گردد.
بعد از اعمال نیروی قبل از اعمال نیروی
اگر سنسور S-G به المان مکانیکی به طور کامل چسبانده شده باشد. تغییر انحنای فوق باعث تغییر طول این سنسور و در نتیجه تغییر مقاومت الکتریکی آن خواهد شد.
به طور خلاصه تغییر وزن باعث تغییر تنش در المان مکانیکی و در نهایت تغییر مقاومت سنسور میشود.
به طور علمی تنش به صورت زیر تعریف می شود.
که در آن تغییر طول ناشی از نیروی ورودی و L طول اولیه المان میباشد.
G.F به نسبت تغییر مقاومت به مقاومت اولیه تقسیم بر نسبت تغییر طول به طول اولیه G.F یا گین فاکتور میشود.
۱-۳- آرایش مداری سنسور S-G :
یا
سنسورهای S-G معمولاً به صورت پل مقاومتی مورد استفاده قرار میگیرند.
فرض و و
علت استفاده از آرایش مداری پل وتسون آن است که :
۱) تغییرات بسیار کوچک ایجاد شده در مقاومتهای مدار را تشخیص دهیم.
۲ ) حساسیت دمایی ناشی از گرم شدن مقاومت در اثر عبور جریان را کاهش دهیم برای این منظور لازم است هر چهار مقاومت مورد استفاده در پل وتستون از یک نوع یعنی چاپ شده باشند. ولی از آنجا که تنها یکی از چهار مقاومت باید نسبت به تغییر طول حساس باشد. لذا یکی از مقاومتها را در جهت تغییرات طول و سه مقاومت دیگر را عمود بر جهت تغییر طول چاپ می کنند.
۱-۴ : معیارهای انتخاب سنسورها S-G
یکی از پارامترهای الکتریکی مؤثر در انتخاب سنسور نسبت تغییر ولتاژ خروجی به دامنة ولتاژ تحریک می باشد. که این پارامتر بر حسب بیان میشود به عنوان مثال گفته میشود این سنسور دارای تغییرات میباشد. یعنی در حالت حداکثر تنش (حداکثر مجاز ۴) و با ولتاژ تغذیة ۱۰ ولت خواهد بود.
هر چند میزان بیشتر باشد. دامنه سیگنال خروجی سنسور در تحریک یکسان بیشتر خواهد بود لذا دقت اندازهگیری افزایش مییابد.
پارامتر الکتریکی دیگری که در انتخاب سنسور باید در نظر گرفته شود سخنی تغییرات G-F می باشد. از آنجا که تغییر طول المان فیزیکی نسبت به تغییرات نیروی وارده ههم جا خطی نیست لذا منحنی GF نیز خطی نمیباشد و به صورت منحنیهایی مانند شکل زیر میباشد.
برای اینکه اندازهگیریهای دارای دقت کافی باشند لازم است سنسور در محدوده خطی آن مورد استفاده قرار گیرند. لذا انتخاب سنسوری که محدودة خطی مناسبی در وزنهای مطلوب داشته باشد. در دقت اندازهگیری بسیار تأثیر گذار است.
پارامتر فیزیکی که در انتخاب سنسور باید مورد توجه قرار گیرد. حداکثر تنش قابل اعمال به سنسور میباشد. سنسور S-G یک المان فیزیکی میباشد و مانند هر المان فیزیکی دیگر دارای محدودة مجاز برای تغییر طول میباشد. بطوریکه اگر تغییر طول سنسور بیش از این مقدار مجاز شود. دیگر خاصیت ارتباعی المان قادر به برگرداندن وضعیت سنسور به طول اولیة آن نخواهد بود و سنسور خاصیت خود را از دست خواهد داد. اگر تغییرات طول باز هم بیشتر باشد میتواند حتی موجب پارگی قطعات چاپی سنسور شود. و لذا برای هر سنسور یک حداکثر تغییر طول مجاز یا حداکثر تنش مجاز قابل اعمال تعریف میشود.
۱-۵- نمونهای از سنسورهای S-G و المانهای میکانیکی:
۱-۶- روش نصب سنسور روی المان مکانیکی .
فصل ۲ :
طراحی و ساخت برد دیجیتال کنترل بار
۲-۱- مقدمه
در این فصل به توضیح و معرفی بر دو قسمتهای مختلف آن پرداخته می شود.
بلوک دیاگرام کلی سیستم در شکل (۴-۱) نشان داده شده است.
فرمانهای ارسالی به برد کنترل آسانسور
این بلوک دیاگرام شامل پنج بلوک اصلی تشکیل دهنده برد است.
– کلید و کنترلر (Microcontroler)
– مبدل آنالوگ به دیجیتال . (A/D)
– تقویت کننده (AMP)
– صفحه کلید (Keyboard)
– نمایشگر (LCD)
علاوه بر این بخشها جهت امکان ارائه آزمایشگاهی پروژه بردهای شبیه سار سنسوری – staiو برد خروجی فرمانهای ارسالی به تابلوی مرکزی آسانسور نیز طراحی و ساخته شده است.
۲-۲- میکروکنترلر
در پیاده سازی سیستم از میکروکنترلر ۸qc51 استفاده شده است. میکرکنترلر ۸qc51 یکی از میکر کنترلرهای همه منظوره می باشد که در بسیاری از سیستمهای الکترونیکی که نیاز به قابلیت برنامهریزی دارند استفاده میگردد.
مشخصات میکروکنترلر ۸qc51:
– 128 بایت حافظه داخلی RAM
– رابط سریال
– ۶۴ کیلو بایت فضای حافظه خارجی که
– ۶۴ کیلو بایت حافظه خارجی برای داده
– پردازنده بولی ( که عملیات روی بیت ها را انجام میدهد)
– ۲۱۰ مکان بیتی آدرس پذیر.
– انجام عملیات ضرب و تقسیم در ۴ میکروثانیه
– چهار در گاه (I/O) هشت بیتی
– دو تایمر (شمارنده ۱۶ بیتی)
– این میکرو کنترلر قابلیت کار با ولتاژ و حداکثر جریان دهی در پورتهای خروجی آن ۱۵ma میباشد و فرکانس کاری این میکرو از ۴ تا ۲۴ مگاهرتز میباشد.
۲-۲-۰۱- بررسی پایههای ۸۰۵۱
این میکروکنترلر یک IC با ۴۰ پایه است که ۳۲ پایه از ۴۰ پایه این IC به عنوان در گاه I/O عمل میکند، که البته ۲۴ خط از این خطوط دو منظوره هستند. هر یک از این خطوط میتواند به عنوان I/O یا خط کنترل و یا بخشی از درگاه آدرس یا گذرگاه داده بکار بروند. یا صفحه کلید قرار گیرند و یا هر خط به تنهایی با قطعات تک بیتی مانند سوئیچ ها و ترانزیستورها ارتباط برقرار کنند.
در گاه صفر PoRT
این درگاه، یک درگاه دو منظوره از پایه ۳۲ تا ۳۹ تراشه می باشد. این درگاه در طراحیهای با کمترین اجزای ممکن به عنوان یک درگاه I/O عمومی استفاده میشود و در طراحیهای بزرگتر که از حافظة خارجی استفاده میکنند، این درگاه یک گذرگاه آدرس و داده مالتی پلکس شده میباشد.
درگاه یک (PORTT):
درگاه یک درگاه اختصاصی I/O روی پایههای ۱ تا ۸ است. وظیفه دیگری برای پایههای درگاه ۱ در نظر گرفته شده است، بنابراین گهگاه برای ارتباط با وسایل خارجی بکار میرود.
درگاه دوم (PORT2) :
درگاه دوم (پایههای ۲۱ تا ۲۸) یک درگاه دو منظوره است که به عنوان I/O عمومی و یا بایت بالای گذرگاه آدرس در طراحی با حافظه کد خارجی بکار میرود. این درگاه همچنین در طراحی هایی که بیش از ۲۵۶ بایت از حافظه داده خارجی نیاز دارند استفاده میشود.
درگاه سوم (PORT3):
در گاه سوم یک درگاه دو منظوره روی پایههای (۱۰ تا ۱۷ ) میباشد. علاوه بر I/O عمومی این پایهها هر یک وظایف دیگری نیز در رابطه با امکانات خاص ۸۰۵۱ دارند.
علاوه بر درگاههای بررسی شده تراشه ۸۰۵۱ پایههای برای کاربردهای خاص دارد.
RST (Roset) :
ورودی RST در پایه ۹ ، آغاز کد اصلی ۸۹۰۵۱ است. هنگامی که این سیگنال حداقل برای دو سیکل ماشین در وضعیت بالا بماند، ثباتهای داخلی ۸۹۰۵۱ با مقادیری مناسبی برای شروع به کار، بار میشوند. مداری که با روشن کردن سیستم IC را Roset میکند تا میکرو از ابتدای نرم افزار شروع به خواند کند مطابق شکل (۳-۶) میباشد.
شکل (۳-۴) اتصال RST به مدار Roset
(Address Latch enable ) ALE:
از این پایه (پایه ۳۰ ) برای جداسازی گذرنامه آدرس و داده استفاده میشود. وقتی که ۸۰۵۱ به یک حافظه بیرون وصل میشود، پورت صفر هر دو مقدار داده و آدرس را تهیه میکند. به بیان دیگر ۸۰۵۱ آدرس و داده را از طریق پورت صفر مالتی پلکس می نماید تا در مصرف پایهها صرفهجویی شود. پایه ALE برای دی مالتی پلکسی کردن آدرس و داده به کار می رود. بنابراین وقتی است، ۸۰۵۱ پورت صفر را به عنوان سیر داده و وقتی ALE=1 است، آن را به عنوان مسیر آدرس به کار میبرد.
در حالت معمولی میباشد و در این صورت به عنوان گذرگاه داده عمل کرده و داده را به خارج و یا داخل هدایت خواهد کرد.
(Exterhal Aceess) EA :
سیگنال ورودی EA در پایة ۳۱ به سطح منطقی بالا (Vce) و یا پایین (GND) وصل میشو.
اگر این پایه در وضعیت بالا قرار گرفته باشد ۸۰۵۱ برنامه را از ROM داخلی غیرفعال میشود و برنامهها از EPROM خارجی اجرا میشوند.
Vce و GND ( اتصال تغذیه):
این تراشه با یک تغذیة +۵V کار می کند. پایه ۴۰ ولتاژ تغذیه را برای تراشه فراهم میکند و پایة ۲۰ زمین است.
۲-۲-۲- نحوة اتصالات میکروکنترلر
در گاه صفر : از این درگاه برای اتصال یک صفحه کلید به میکرو استفاده شده است.
درگاه یک (p1): این پورت در سیستم به خروجیهای ADC متصل است و مقدار دیجیتال سنسور بر روی این پورت ریخته میشود.
درگاه دوم (P2): این درگاه برای اتصال میکرو به صفحه نمایش بکار رفت است.
درگاه سوم (P3) : پایههای (P3.2 , P3.1 , P3.0) به بلوک ADC متصل هستند که پایة P3.2 پایة INT فعال کننده ADC است و دو پایه دیگر برای RD و WR تراشه ADC است.
پایههای P3.4 تا p3 به بلوک فرمانهای کنترل آسانسور متصل می شود.
پایة P3.3 (SET) نیز به یک LED نشان دهندة خاتمه عملیات Setting متصل میشود.
RST: این پایه به مدار Roset متصل میگردد.
XTAL1 و XTAL2 : این پایهها به یک کریستال ۱۲ کیلو هرتز متصل هستند.
EA: در مدار مورد برسی این پایه به سطح بالا وصل میشود تا برنامه از ROM داخلی خوانده شود. Vce و GND: این دو پایه به مدار منبع تغذیه که ولتاژ ۵ ولت را تولید می کند وصل نشدهاند.
شکل ۴-۴ اتصالات میکروکنترلر
۲-۳- تبدیل کننده آنالوگ به دیجیتال
در این بخش تراشة ADC (مبدل آنالوگ به دیجیتال) بررسی شده است.
ابتدا به توصیف تراشه ADC پرداخته شده و سپس چگونگی اتصال آن به ۸۰۵۱ نشان داده شده است.
مبدلهای آنالوگ به دیجیتال از وسایل متداول برای اخذ داده میباشند. کامپیوترهای دیجیتال مقادیر دو رویی جدا از هم را بکار میبرند. ولی در جهان فیزیکی همه چیز آنالوگ است یک کمیت فیزیکی (وزن، دما، فشار، رطوبت) با وسیلهای به نام مبدل قابل تبدیل به یک سیگنال الکتریکی (جریان یا ولتاژ) است. مبدلها را سنسور یا حسگر می نامند. گر چه سنسورها برای وزن دما، فشار، سرعت و . . . ساخته شدهاند ولی همه آنها یک نوع خروجی را که ولتاژ یا جریان است تولید میکنند بنابراین یک مبدل آنالوگ به دیجیتال برای تبدیل سیگنالهای آنالوگ به اعداد دیجیتال لازم است، بطوریکه PC بتواند آنها را بخواند. در سخت افزار مورد استفاده از یکی از پرمصرفترین تراشههای ADC به نام تراشة ADC0804 استفاده شده است.
۲-۳-۱- تراشه ADC 804
آی سی ADC804 یک مبدل آنالوگ به دیجیتال و از خانواده ADC800 است. با ts ولت کار می کند و دارای قابلیت دقت یا تجزیه ۸ بیتی است. علاوه بر دقت زمان تبدیل هم فاکتور مهم دیگری در انتخاب ADC است. زمان تبدیل به معنی زمانی است که ADC لازم دارد تا سیگنال آنالوگ ورودی را به روی پایههای dKR یا CLKIN تغییر است ولی نمیتواند سریعتر از ۱۱۰ میکرو ثانیه باشد.
۲-۳-۲- بررسی پایههای ADE 804
CS: پایة CS (پایه ۱ ) یک ورودی فعال پایین است که برای فعال کردن تراشه بکار می رود . برای فعال کردن تراشه این پیه صفر میشود.
(Road) RD :
این سیگنال ورودی فعال پایین روی پایه ۲ است. ADC سیگنال آنالوگ ورودی را به معادل دودویی تبدیل کرده و آن را در یک ثبات داخلی نگه می دارد. RD برای خارج کردن داده از تراشه ۸۰۴ استفاده میشود. وقتی CS=0 است اگر یک پالس بالا- پائین به پایه RD اعمال شود، بیت خروجی دیجیتال در پایههای نشان داده خواهند شد. پایه RD فعال ساز خروجی هم خوانده میشود.
(wright) WR:
یک سیگنال ورودی فعال پایین روی پایه ۳ است. که آغاز روند تبدیل را به ADC804 اطلاع میدهد. اگر باشد به هنگام انتقال بالا به پائین WR، تراشه ADC804 شروع به تبدیل ورودی آنالوگ vin به عدد دیجیتال ۸ بیتی می نماید. مقدار زمان لازم برای تبدیل به مقادیر clkin و clkR بستگی دارد. پس از اتمام تبدیل داده پایه INTR بوسیلة ADC 804 به پایین واداشته می شود.
CLKR- CLKIN:
CLKIN پایه ۴ تراشه یک پایه ورودی متصل به یک منبع ساعت خارجی است که هنگام استفاده از ساعت خارجی برای زمان بندی استفاده میشود. تراشة ۰۴ دارای یک مولد ساعت داخلی نیز است که برای استفاده از آن پایههای CLKR- CLKIN به یک مقاومت و یک خازن وصل می شوند.
در این مدار از ساعت خارجگی استفاده میشود و پایة ۴ را به پایة ALE میکرو متصل میکنیم.
INTER (وقفه):
INTER پایه پنجم ADC که یک پایه خروجی فعال پایین است. این پایه معمولاً بالاست و وقتی تبدیل پایان یابد، به سطح پایین رفته و به cpu آمادگی برای برداشتن داده را اطلاع می دهد. پس از پائین رفتن INIR ، یک CS=0 ایجاد و یک پالس بالا به پائین به پایة RD فرستاده میشود تا داده به خارج از تراشه ADC 804 برود.
Vin (-) , Vin (+) : Vin (-) , Vin (+) ورودیهای آنالوگ تفاضلی هستند که در آن Vin (+) – Vin (-) = Vin میباشد. اغلب Vin(-) به زمین و Vin(+) به وردی آنالوگ جهت تبدیل به دیجیتال وصل است.
: که پایه های ۱۱ تا ۱۸ را شامل می شوند ( D7 همان MSB و همان LSB است) پایههای خروجی داده دیجیتال است. این خروجی های سه حالته بافر شده و داده تبدیل شده فقط رمانی که CS=0 باشد و RD به پایین وا دا شته شود قابل دسترسی است.
برای محاسبة ولتاژ خروجی، فرمول زیر بکار میرود:
که برابر است با خروجی داده دیجیتال ، Vin ولتاژ ورودی آنالوگ و اندازه پله یا دقت هم در ازای کوچکترین تغییر می باشد که برای ADC هشت بیت برابر است.
: پایة ۹ تراشه یک ولتاژ ورودی است که به عنوان نرجع بکار می رود.
اگر این پایه باز باشد، وردی آنالوگ برای ADC804 در محدودة ۰ تا ۵ ولت است مثل پایة Va) با این وجود کاربردهای بسیار دیگری که به vin وصل میشوند به جز تا ۵ ولت است.
هنگامی به کار می رود که ولتاژ ورودی در محدوده نباشد مثلاً اگر محدوده وردی آنالوگ ۰ تا ۴ ولت باشد. به ۲ ولت وصل می شود. جدول (۱-۴) محدودة Vin را برای انواع ورودیهای نشان میدهد.
۲-۳-۳- روش اتصال ADC 804
در مباحث بالا به بررسی پایههای ADC 804 پرداخته شد و چگونگی فعال شدن هر پایه توضیح داده شد. در این قسمت چگونگی اتصال هر یک از پایهها به اجزای دیگر مدار نشان داده میشود.
پایة Cs (پایة ۱): برای فعال کر دن A/D صفر میشود.
پایة Rd ( پایة ۲) : برای خواندن مقداری که در ثبات داخلی A/D نگهداری می شود باید به این پایه یک پالس بالا- پایین اعمال شود. این پایه به پایه صفر از پورت سوم (P3.0) تراشه ۸۰۵۱ متصل شده است، که به صورت نرمافزارش پاس از این پایه دریافت می کند. فعال میشود.
پایه WR (پایة ۳): برای آغاز روند تبدیل ورودی آنالوگ به عدد دیجیتال به این پایه باید یک پالس بالا – پایین اعمال شود. این پایه به پایة یک از پورت سوم (p3.1) از تراشه ۸۰۵۱ متصل شده است که بصورت نرمافزاری پالس از این پایه دریافت می کند.
Clking R (پایه ۴ و ۱۹) : برای زمانبندی A./D همانطوری که در شکل مشاهده میشود از clk میکرو استفاده شده است به این ترتیب که پایة۳۰ ALE/P به CLKIN در پایة c.4 ADC 84 متصل است.
INTR ( وقفه ) پایة ۵) : این پایه نشان دهنده اتمام تبدیل ADC است. زمانیکه کار ADC است .
برای اولین بار در بین تمام وب سایت های ایرانی آموزش فوق العاده کاربردی ترکیب اینترنت های وایرلس و اینترنت موبایل ( WIFi+3G یا W
اختصاصی از یارا فایل برای اولین بار در بین تمام وب سایت های ایرانی آموزش فوق العاده کاربردی ترکیب اینترنت های وایرلس و اینترنت موبایل ( WIFi+3G یا WIFI+4G ) دانلود با لینک مستقیم و پرسرعت .

برای اولین بار در بین تمام وب سایت های ایرانی
آموزش فوق العاده کاربردی ترکیب اینترنت های وایرلس و اینترنت موبایل ( WIFi+3G یا WIFI+4G )
این آموزش در محیط اندروید و بدون نیاز به هرگونه دانش و تخصصی انجام می گیرد
و با آموزش هایی که در محیط ویندوز قابل انجام است و در سایت های ایرانی وجود دارد کاملا متفاوت است
این آموزش در کمتر از 1 دقیقه قابل انجام و فقط نیازمند به روت است
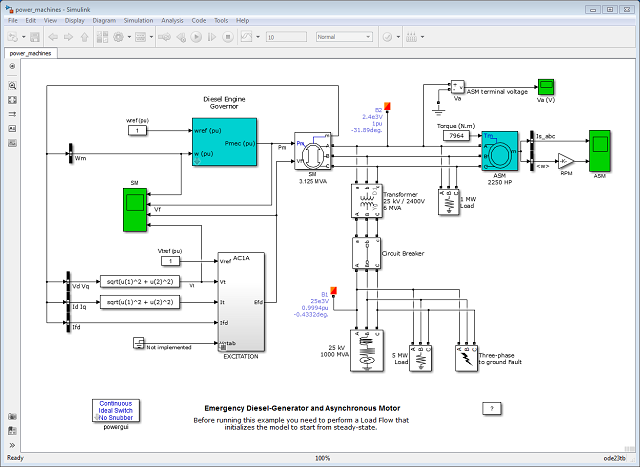
پروژه با عنوان: شبیه سازی متعادل سازی بار در شبکه های برق با نرم افزار Matlab
اختصاصی از یارا فایل پروژه با عنوان: شبیه سازی متعادل سازی بار در شبکه های برق با نرم افزار Matlab دانلود با لینک مستقیم و پرسرعت .

هدف از این پروژه در درجه اول ارائه الگوریتم مناسب جهت متعادل سازی است که در ادامه به تفصیل بیان خواهد شد. در فصل نخست، مفاهیم و تعاریف اولیه متعادل سازی بار مطرح می گردد که شامل عدم تعادل بار، توان بار و بار متقارن خواهد بود. در حقیقت این فصل به شناخت مفهوم کامل متعادل سازی می پردازد. در فصل دوم، ابتدا عوامل ایجاد عدم تعادل را معرفی نموده تا بتوانیم در ارائه الگوریتم مناسب و روش های متعادل سازی از آن بهره مند شویم. همچنین با بیان آثار عدم تعادل بار، اهمیت و ضرورت اجرای پروژه های متعادل سازی اثبات می شود. فصل سوم، مهمترین فصل و هدف اصلی پروژه را در بر خواهد داشت. در این فصل، الگوریتم متعادل سازی و اصول آن ارائه شده است. در ادامه مطلب به عنوان نمونه شبکه ای را فرض نموده و با اجرای الگوریتم به کمک نرم افزار متلب نتایج آن حاصل شده است. همچنین نتایج حاصل از پخش بار به کمک نرم افزار میزان تاثیر الگوریتم و جابجایی بار روی فازها را اثبات خواهد نمود. فصل چهارم بر مبنای مطالب بیان شده در فصول گذشته یعنی با استفاده از مفاهیم عدم تعادل، عوامل ایجاد مشکل، اصول الگوریتم به بیان روش های موجود متعادل سازی می پردازیم. قطعا هر یک از این روش ها، مزایا و معایب خاص خود را داشته و دارد که مورد بررسی قرار خواهد گرفت...
پروژه شبیه سازی متعادل سازی بار در شبکه های برق با نرم افزار Matlab، مشتمل بر 77 صفحه با فرمت pdf، تایپ شده، به زبان فارسی، به ترتیب زیر گردآوری شده است:
فصل 1: تعاریف و مفاهیم اولیه بار
- عدم تعادل چیست؟
- تعاریف عدم تعادل
- تعریف اول IEEE Std.936-1987
- تعریف دوم IEEE 112-1991
- تعریف سوم NEMA
- تعریف درست (اصلاح شده) عدم تعادل IEEE
- مفهوم توان الکتریکی
- توان اکتیو (توان واته، توان مفید)
- توان راکتیو
- اثرات نامطلوب ضریب توان پایین
- اصلاح ضریب توان
- بارهای خازنی
- بارهای القایی
- خازن های موازی
- نصب خازن موازی
- مولفه های متقارن
فصل 2: عوامل، آثار و مشخصه های عدم تعادل بار روی سیستم توزیع
- آثار عدم تعادل در افزایش تلفات شبکه توزیع
- افزایش تلفات قدرت
- جریان دار شدن سیم نول
- مقدار جریان سیم نول
- افت ولتاژ در اثر نامتعادلی
- تاثیر نامتعادلی ولتاژ بر الکتروموتورها
- اشغال ظرفیت شبکه
- تاثیر نامتعادلی بارها بر کارکرد کنتورها
- اثرات اقتصادی
- عوامل ایجاد عدم تعادل روی شبکه فشار ضعیف
- عوامل ایجاد عدم تعادل ساختاری (ساختمانی)
- عوامل ایجاد عدم تعادل کارکردی
فصل 3: روش های متعادل سازی بار در شبکه های توزیع
- متعادل سازی با استفاده از فیلتر اکتیو
- مزایا و معایب متعادل سازی با استفاده از فیلتر اکتیو
- متعادل سازی بار به کمک کنترل توان راکتیو
- اصول متعادل سازی بار
- الگوریتم متعادل سازی بار
- متعادل سازی و جبران سازی بهینه در فیدرهای توزیع
- اصول و الگوریتم متعادل سازی بهینه فیدرها
- تنظیم تعادل بار به روش جا به جایی دستی روی فازها
- استفاده از روش مشترک شماری
- استفاده از قدرت قراردادی مشترکین
- روش محاسبه شاخه با کمترین جریان
- متعادل سازی به کمک کلید اتومات
فصل 4: الگوریتم متعادل سازی بار و شبیه سازی در شبکه های توزیع
- انتخاب الگوریتم مناسب
- اصول الگوریتم جا به جایی
- فلوچارت
- شبکه نمونه
- تحلیل پاسخ نرم افزار Matlab برای شبکه نمونه
- نتایج شبیه سازی شبکه در فضای نرم افزار
- برنامه نویسی پروژه در متلب
- تحلیل نتایج شبیه سازی شبکه
جهت خرید پروژه شبیه سازی متعادل سازی بار در شبکه های برق با نرم افزار Matlab به مبلغ فقط 4000 تومان و دانلود آن بر لینک پرداخت و دانلود در پنجره زیر کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی کتیا طراح برتر قیمت محصولات ما را با سایر محصولات مشابه و فروشگاه ها مقایسه نمایید!!
!!!تخفیف ویژه برای کاربران ویژه!!!
با خرید حداقل 10000 (ده هزارتومان) از محصولات فروشگاه اینترنتی کتیا طراح برتر برای شما کد تخفیف ارسال خواهد شد. با داشتن این کد از این پس می توانید سایر محصولات فروشگاه را با 20% تخفیف خریداری نمایید. کافی است پس از انجام 10000 تومان خرید موفق عبارت درخواست کد تخفیف و ایمیل که موقع خرید ثبت نمودید را به شماره موبایل 09365876274 ارسال نمایید. همکاران ما پس از بررسی درخواست، کد تخفیف را به شماره شما پیامک خواهند نمود.