

فناوری MEMS چیست؟
فناوری MEMS یا فناوری سیستمهای میکروالکترومکانیکی ، حاصل تلفیق اجزای مکانیکی، حسگرها، محرکها و قطعات الکترونیکی بر روی یک لایه سیلیکون به کمک فناوری ساخت تراشههای میکرونی است .
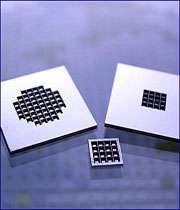
در واقع « MEMS » ، « ریزفناوری ها » یا سیستم های میکرو الکترو مکانیکی در واقع تلفیقی از اجزای مکانیکی ، حس گر ها ، بازو های مکانیکی و اجرای الکترونیکی هستند که بر روی لایه ای از ماده استراتژیک « سیلیکون » قرار دارند.این ساختار مکانیکی بسیار کوچک در ابعاد « میکرون » بر پایه تکنولوژی « تراشه های الکترونیکی » استوار است.
امروز در کشور های پیشرفته جهان ، توسعه تلفیقی سیستم های مکانیکی و الکترونیکی در ابعاد بسیار کوچک مورد نظر است ، زیرا این بخش مهم علمی موجب افزایش سرعت و کم حجم شدن ابعاد صنایع در بخش صنعت خواهد شد.
فناوری « MEMS » یا فناوری سیستم های میکرو الکترو مکانیکی ، در صنایع مختلف و اثرگذار جهان از جمله صنایع خودرو سازی ، موشکی ، تراشه ها و نظامی کاربرد بسیار زیادی دارند.امروزه لزوم توسعه این فناوری باعث شده است تا بسیاری از کشور های جهان برای توسعه این فناوری و تولید محصول اقداماتی انجام و در این راستا سرمایه گذاری هایی صورت دهند.
کشور های ژاپن و کره جنوبی که از پیشگامان توسعه این فناوری در جهان بودند ، امروزه تولیدات بسیاری در زمینه صنایع خودرو سازی و محصولات الکترونیکی « ریزفناورانه » دارند.

در حالی که بر اساس آمار های ارائه شده نیاز به « MEMS » روز به روز در حال گسترش است ، بازار این فناوری در سال 2011 از مرز 11 میلیارد دلار گذشت ، ضمن این که نکته قابل تأمل دخالت تنها چند کشور در صادرات محصولات این فناوری است.از دیگر موارد برجسته در این موضوع نیاز روز افزون به این فناوری با توجه به این مسأله که بشر دریافته است باید نیاز های خود را بدون ایجاد آلودگی و اشغال فضای بیهوده توأم با سرعت بیشتر برطرف کند.
به طور کلی مطالعه و ارزیابی عملکرد برای توسعه تولید و تجاری سازی محصولات بر پایه ریزفناورانه می تواند الگویی مفیدی برای شکل دهی یک مدل توسعه در کشور ما باشد ، زیرا تجارت پر سود این فناوری و آینده صنعتی دنیا و ارتباط آن با این فناوری کتمان ناپذیر است ؛ ضمن این که برطرف کردن نیاز های اصلی صنعتی کشور در گرو توسعه این فناوری است.
ویژگی های فناوری MEMS

در حالی که قطعات الکترونیکی با استفاده از روال ساخت مدار مجتمع (IC) ساخته میشوند (همانند فرآیندهای CMOS ، Bipolar و یا BICMOS)، عناصر میکروماشینها از طریق فرآیندهای ماشین کاری میکرونی ( Micromachining ) تولید میشوند به این ترتیب که بر حسب مورد، قسمتهایی از ویفر (Waf ER) برداشتهشده یا لایههای جدیدی به آن اضافه میشود MEMS. با تلفیق میکروالکترونیک سیلیکونی با فناوری ماشین کاری میکرونی، نوید تحول را در تقریبا" هرنوع محصولی میدهد تا به این ترتیب به "نظام روی یک تراشه" جامة عمل بپوشاند. MEMS فناوری واقعاً توانایی است که با درک و کنترل قابلیتهای "میکروسنسورها" و "میکرو محرکها" و به همراه آوردن توانایی محاسبات دستگاههای میکروالکترونیکی, موجب پیشرفت در تولیدات هوشمند میشود. MEMS همچنین فناوری بسیار گسترده و مستعدی است، چه در کاربرد و چه در نحوة ساخت و طراحی ابزارها.
فناوری MEMS امکان تلفیق میکروالکترونیک را با درک فعال و اعمال کنترلی فراهم کرده، فضای طراحی و کاربرد را بسط میدهد.
فناوری MEMS یا فناوری سیستمهای میکروالکترومکانیکی ، حاصل تلفیق اجزای مکانیکی، حسگرها، محرکها و قطعات الکترونیکی بر روی یک لایه سیلیکون به کمک فناوری ساخت تراشههای میکرونی است
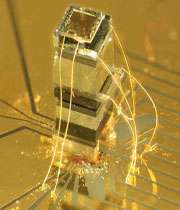
مدارهای پیوستة میکروالکترونیکی (IC) میتوانند بعنوان مغز متفکر سیستمها باشند و MEMS با اضافهکردن "چشم" و "بازو" ، این قدرت تفکر را توسعه میدهد تا این میکروسیستمها بتوانند محیط اطرافشان را حس کرده و کنترل نمایند.

این حسگرها در سادهترین حالت خود با کمک اندازهگیری پدیدههای مکانیکی، گرمایی، زیستی، شیمیایی، نوری و مغناطیسی، اطلاعات را از محیط جمعآوری میکنند. پس از اخذ اطلاعات از حسکنندهها, دستگاههای الکترومکانیکی به کمک قدرت تصمیمگیری خود، محرکها را به پاسخهایی چون : حرکت، جابجایی، تنظیمکردن، پمپکردن و فیلترکردن وادار کرده, محیط را به سمت نتایج موردنظر هدایت میکنند. از آنجا که دستگاههای MEMS همانند ICها با تکنیکهای ساخت ناپیوسته ساخته میشوند، میتوان سطح بسیار بالایی از کارکرد، اطمینان و پیچیدگی را با هزینه اندک بر روی تراشة کوچک سیلیکونی شکل داد.
کاربرد فناوری MEMS
فناوری MEMS توانایی کشفیات جدیدی را در علوم و مهندسی دارد، مثل:
*میکروسیستمهای واکنشهای زنجیرهای پلیمراز (PCR) برای تقویت و شناسایی DNA
*میکروسکپهای تونلزنی پیمایشگر (STM) که با فرآیندهای ماشینکاری میکرونی ساخته شدهاند
*تراشههای زیستی شناساگر عوامل خطرناک شیمیایی و بیولوژیکی
* فناوری جهشی میکروسیستمها جهت غربال و انتخاب سریع دارو
ابزارهای MEMS در بازارهای مختلف صنعتی, تعیینکنندة کیفیت محصولات شده و پیشبینی میشود که این فناوری سالانه 50% رشد داشته باشد.
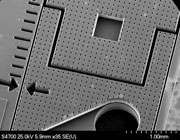
اگرچه وسایل MEMS خیلی کوچک اند (مثلا" MEMS دارای موتورهای الکتریکی کوچکتر از قطر موی انسان است) ولی اهمیت فناوری MEMS فقط به اندازة آنها مربوط نمیشود. علاوه بر این، MEMS فقط به پایه سیلیکونی محدود نمیشود، هرچند سیلیکون به دلیل داشتن خواص عالی به یک انتخاب جالب توجه برای مصارف مکانیکی با کیفیت بالا تبدیل شده است. (مثلا" نسبت استحکام به وزن برای سیلیکون از خیلی از مواد مهندسی دیگر بالاتر است، که ساخت وسایل مکانیکی با پهنای باند وسیع (band width) را ممکن میسازد). در عوض، MEMS فناوری تولیدی است که راه جدیدی برای ایجاد سیستمهای الکترومکانیکی ارائه میدهد با تکنیکهای تولید ناپیوسته ارائه میدهد، مانند روش تولید مدارهای مجتمع که باعث تولید عناصر الکترومکانیکی در کنار قطعات الکترونیکی میشود.
مزایای فناوری MEMS
فناوری MEMS مزایای متعددی دارد: اول اینکه MEMS فناوری گستردهای است که بالفعل میتواند تأثیر مهمی بر انواع تولیدات تجاری و نظامی بگذارد. هماکنون MEMSS در هر چیزی، از نمایش فشار خون گرفته تا سیستمهای تعلیق فعال خودروها active suspension ) systems )مورد استفاده قرار میگیرد. لذا ماهیت فناوری MEMS و کاربردهای متعددش، آن را از فناوریهای مرسوم حتی مدارهای مجتمع و ریزتراشهها فراگیر تر نموده است.

دوم اینکه MEMS فاصلة بین سیستمهای مکانیکی پیچیده و مدارهای مجتمع الکترونیکی را پر میکند. حسکنندهها و محرکها عموماً گران قیمتاند، به علاوه سیستم "الکترونیکی، محرکها و حسکنندهها" در ابعاد بزرگ قابل اعتماد نیستند. فناوری MEMS امکان ساخت سیستمهای میکروالکترومکانیکی را با استفاده از تکنیکهای ساخت ناپیوسته فراهم کرده موجب برابری قیمت و اعتبار حسکنندهها و محرکها با مدارهای مجتمع میشود. جالب اینکه، انتظار میرود کارآیی دستگاهها و ابزارهای MEMS بالاتر از عناصر و سیستمهای مقیاس ماکرو و قیمت آن خیلی پایینتر از آنها باشد.
به عنوان یک نمونة جدید از فواید فناوری MEMS میتوان به شتابسنجهای MEMS اشاره کرد، که به سرعت جایگزین سرعتسنجهای مربوط به سیستمهای کیسة هوا در اتومبیل میشود. در روش مرسوم از چندین شتابسنج حجیم شامل اجزای مختلف در جلوی خودرو استفاده میشود که قطعات الکترونیکی سیستم در نزدیکی کیسة هوا قرار دارند و قیمت مجموعه بالغ بر 50 دلار است.
فناوری گستردهای است که بالفعل میتواند تأثیر مهمی بر انواع تولیدات تجاری و نظامی بگذارد
MEMS این امکان را فراهم کرده تا شتابسنج و وسایل الکترونیکی با هزینهای کمتر از 5 تا 10 دلار در یک ریزتراشة سیلیکونی تلفیق شوند. شتابسنج MEMS خیلی کوچکتر، کارآمدتر، سبکتر و قابل اعتمادتر بوده و قیمتی بسیار کمتر از شتابسنجهای مرسوم دارد. لذا انتظار میرود ظرف چند سال آینده این شتابسنجها جایگزین دستگاههای مشابه در کلیه خودروهای خارجی و داخلی گردند. بهای اندک عناصر شتابسنج MEMS ، اجازة ساخت کیسة هوا برای حفاظت مسافرین در مقابل ضربات کناری را میدهد. ادامة پیشرفت در فناوری شتابسنج MEMS در 5 سال آینده، امکان میدهد تا حسکنندهها, اندازه و وزن یک مسافر را تعیین کرده پاسخ بهینه را محاسبه کنند تا صدمات احتمالی ناشی از کیسه هوا کاهش یابد.
فهرست مطالب:
پاورپوینت کامل با عنوان سیستم های میکروالکترومکانیک یا MEMS در 84 اسلاید







